Rigid Robotics是一家总部位于本拿比的矿业科技公司,近日(2026年5月)在日立建机与Founders Factory举办的全球矿业创新大赛中获得「更智能机器(Smarter Machines)」类别的全球冠军,这也为其矿山自动化技术赢得了重要的国际背书。
大赛从 2025 年 11 月到 2026 年 1 月共收到全球 135 家初创企业申请,最终筛选出 10 家进入决赛。
决赛于 4 月 16 日在澳大利亚布里斯班举行,由来自日立建机、Chrysalix VC、力拓(Rio Tinto)和 Founders Factory 的六人评审团评判。
比赛与获奖情况
这次是首届 LANDCROS Innovation Studios Mining Challenge,旨在寻找面向未来矿业的创新技术初创公司。
Rigid Robotics 在「更智能机器」类别中胜出,击败了同样来自大温地区的 Green Edge Computing Corp(GECCO)以及以色列的 Dig Robotics。

Rigid Robotics 的技术亮点
Rigid Robotics 专注将人工智能应用于矿山挖掘设备,致力于让 AI「理解铲斗操作」,在当前阶段增强司机操作能力,并为未来的完全自动化挖掘打基础。
其平台帮助矿山现场提升装载作业生产率,向操作员提供可执行的指导,同时逐步迈向更高水平的自主挖掘。
获奖带来的机会与意义
根据 Mining Beacon 报道,这次获奖让 Rigid Robotics 有机会与日立建机合作,加速其自动化技术的商业化,并获得 Founders Factory 投资人网络的曝光与支持。
Rigid Robotics CEO Mehran Motamed 在 LinkedIn 上表示,这一认可证明了产品的实力、在真实生产环境中的验证,以及他们所解决问题在现实世界中的重要性。
对日立建机来说,这一全球挑战赛的发起是为了与全球优秀初创公司「共同共创矿业的未来」,并强调创新必须跨越边界、行业与文化开放协作。
对 BC 矿业科技生态的意义
除 Rigid Robotics 外,来自温哥华地区的 GECCO 也进入了同一类别决赛,这凸显了不列颠哥伦比亚省在矿业技术领域日益突出的国际存在感。
其他两个大类的优胜者分别是英国的 IntelliSense.io(更智能矿山现场)和澳大利亚的 Clear Carbon(低影响与可持续采矿),日立计划与三家获奖公司继续探索合作机会。
补充资料:Rigid Robotics 公司与产品简介
Rigid Robotics 是一家面向大型矿山(尤其是露天矿)的工业 AI 技术公司,核心产品是“挖掘机/电铲作业智能与操作员增强系统”,并以此作为迈向完全自主挖掘(Shovel Autonomy)的路线图基础。
公司概况与定位
公司聚焦“矿山采掘环节”的挖掘设备(shovels)智能化,强调 AI 能够实时理解铲车/电铲的作业行为与工况。
官方宣传口径是:今天通过“操作员增强(Operator Augmentation)”提升效率,未来实现“自主挖掘(Autonomous Excavation)”,本质上是为矿山提供一套数据驱动的生产力提升与自动化平台。
解决的问题 Pain Points
Rigid Robotics 把矿山挖掘环节的核心痛点概括为“操作员差异导致的产能损失”:
不同班次、不同操作员表现差异大,导致单位时间产量波动明显,存在“可提升空间但缺乏实时手段识别和纠偏”的问题。
具体原因包括:新人多、经验不足;培训不连续且不一致;操作员流动率高;缺乏实时反馈;驾驶室信息过载等。矿方通常知道“有差距”,但不能在当班内实时发现问题并改善。
产品与技术能力
Rigid Robotics 的产品可以理解为“矿山铲装作业智能平台 + 驾驶室内实时指导系统 + 未来的自动控制层”。
阶段性产品路线(Roadmap)
公司明确了三阶段路线:
Phase 1:Foundational Shovel Intelligence(基础挖掘智能)
部署在铲车上的传感与智能系统,实时捕捉挖机的运动、环境上下文和决策行为,对整个挖掘循环进行理解与拆解。
已有 50+ 套平台部署,系统经过实地验证并可“立即交付使用”。
Phase 2:Operator Augmentation(操作员增强)

在驾驶室内为操作员提供实时教练式指导和工作流决策支持。
系统给出可执行的优化建议,帮助普通操作员向“顶尖操作员水平”靠拢,从而在每个班次持续拉高生产效率。
Phase 3:Autonomous Excavation(自主挖掘)
在前述智能层之上叠加自动控制系统,使铲机具备“物理模型 + 数据驱动”的智能挖掘能力。
强调“OEM integration ready”,即可以与主机厂控制系统集成,为未来全自动挖掘奠定基础。
智能平台关键数据能力
Foundational Shovel Intelligence 聚焦于对挖掘作业的“高保真、结构化理解”,包括:
Bucket Position & Trajectory:斗齿/铲斗的空间位置、轨迹与运动过程,构成对挖掘路径的精细理解。
Cycle Timing & States:自动识别挖掘循环中的各个状态(如装载、回转、卸料等),并对每个循环时间进行拆解分析。
Dig Effort & Material Interaction:量化挖掘力度和设备与矿岩/物料接触过程,帮助判断作业策略是否合理。
Vibration & Structural Stress:监测振动特征与结构应力事件,为设备维护与寿命管理提供数据。
Anomaly Detection:基于遥测数据发现异常行为、模式外操作,为安全与效率提供预警。
Operator Augmentation(操作员增强)能力
在智能平台之上,Rigid 将数据转化为驾驶室内的实时行为指导:
针对操作员行为提供实时教练式反馈,例如挖斗角度、停顿时间、循环节奏等,帮助其更接近最佳操作模式。
推荐是基于“真正影响生产力的关键驱动因素(productivity drivers)”,并以工作流的方式支持操作决策,而不是单点提示。
成效与价值主张
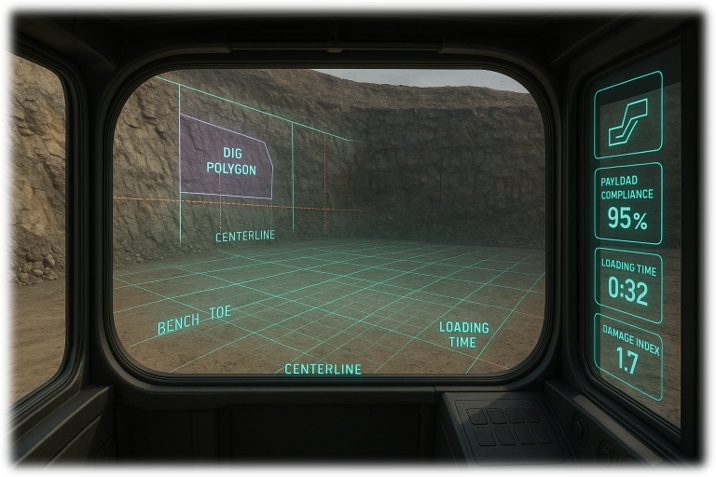
在一个包含 548 个班次、12 个月的挖掘基线数据中,系统识别出约 290 万吨“未实现产能”(Missed Production),理论上相当于当前水平基础上的最高可达 24% 的产能提升潜力。该价值主张是其“ROI 叙事”的核心。
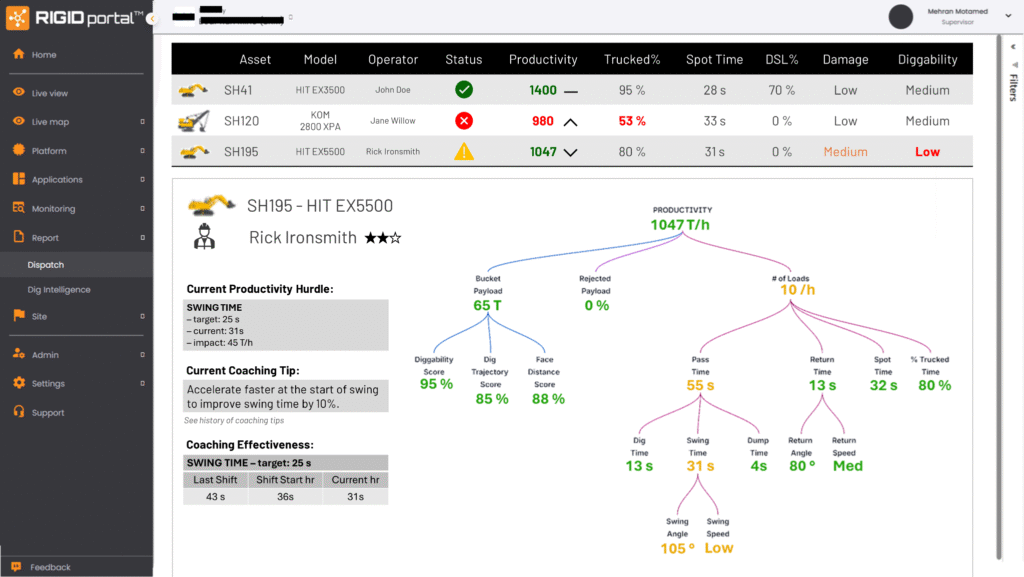
通过实时监测挖掘环境与关键绩效指标(KPI),该系统可以在班次进行中“识别落后的 KPI 并立即干预”,帮助缩小“当前表现”与“可达到表现”之间的差距。
交付成熟度与安全性
现场成熟度:
50+ 平台部署,说明产品已经在多个矿区和设备上进行过实际运行。
具有 4+ 年商业部署与支持经验,且已在多个铲机试点与矿区得到实地验证。
对外宣称“准备好部署、支持与扩展”,说明目前产品已处于可规模化阶段。
数据与网络安全:
保持 SecurityScorecard A–A+ 评级,作为其持续对外安全审计结果。
已通过某“tier-2 mining company”的网络安全评估,被视为关键供应商(critical vendor)。
明确强调面向工业与关键基础设施环境的数据安全、数据所有权与保密性设计。
服务项目拆解
结合网站信息,可以将其服务项目理解为以下几类:
挖掘机/电铲智能系统部署与集成服务
包含传感器与边缘计算硬件部署、数据采集与整合、与矿山现有系统/OEM 控制系统集成等。
目标是快速建立“Foundational Shovel Intelligence”基础层,使矿山能够实时了解每台铲车的运行状态与作业质量。
运营数据分析与生产力优化服务
持续分析挖掘环节的数据,识别产能损失点、操作模式问题和维护风险。
为矿山提供挖掘环节 KPI 报告、提升建议,以及结合运营策略的优化方案(如最佳装载策略、循环节奏等)。
驾驶室内操作员增强与培训辅导
部署 Operator Augmentation 解决方案,为一线操作员提供实时教练与行为反馈。
能配合矿山内部培训体系,用“数据 + 实时反馈”的方式持续提升操作员队伍整体水平,缩小新人与老手的差距。
自主挖掘系统合作与 OEM 集成项目
与设备 OEM(主机厂)或大型矿山“创新/自动化部门”合作,共同推进自动挖掘系统开发与集成。
将其智能平台输出的理解层与控制层结合,走向高度自动化甚至完全自主的挖掘作业。
咨询与联合开发(Co-development)
网站提到“Whether you… are exploring this for your operation, or are interested in integrating this into your systems”,说明公司也愿意以项目制方式参与到矿山或系统集成商的定制集成、联合开发中。
目标客户(ICP)画像
从官网内容与产品特性推断,其理想客户主要集中在“中大型矿山运营商”和“相关工业生态合作伙伴”:
核心 ICP:中大型露天矿运营商
特点:
行业:金属矿(铜、铁矿、镍、煤等)露天矿为主,拥有多台大型电铲/液压挖机和配套卡车的“卡铲作业”生产模式。
规模:年产量大,单台铲机小时成本极高,对生产效率和设备利用率非常敏感。
现状:
已经在使用基础的车队管理系统(FMS)和生产调度系统,有一定数据基础,但挖掘环节“操作细节级”的实时数据与指导不足。
正在推进数字化、自动化、无人化矿山项目,需要一个可靠的“挖掘作业智能模块”,为后续自动驾驶、无人运输系统配套。
组织与岗位画像:
典型决策人:
运营副总裁(VP Operations)、矿山总经理、技术/生产总监。
负责矿山整体生产效率、成本控制与安全指标。
关键影响者:
采矿工程经理、生产主管、设备维护经理、自动化/数字化负责人(Head of Digital Transformation / Mining Technology)。
负责车队管理、数据分析、自动化试点项目以及设备升级决策。
痛点与需求匹配:
希望减少不同操作员、不同班次之间的产量波动,提升计划达成率和“吨矿成本”表现。
希望用数据和实时指导的方式,持续提升操作员团队平均水平,而不是依赖少数“明星操作员”。
希望为未来的“无人化矿山”打基础,需要可集成、可扩展、已在现场证明可靠的智能系统。
次级 ICP:矿山设备 OEM 与系统集成商
特点:
包括大型挖掘机/电铲制造商、矿用车队管理系统供应商、矿山自动化解决方案提供商等。
关注点是如何将更先进的“挖掘作业智能”集成到自家控制系统和解决方案中,以提升产品竞争力。
适配场景:
OEM 在开发“Autonomous/Assisted Shovel”产品线时,希望引入第三方成熟的“shovel intelligence layer”,而不是完全从零自建。
系统集成商为大型矿山做“端到端自动化项目”时,需要可靠的挖掘智能模块,与自动驾驶卡车、调度系统协同。
其他潜在 ICP:有强烈数字化/安全要求的矿山集团
那些对数据安全、合规和 cyber security 要求非常高的矿山集团(例如跨国矿业公司、国有大型企业),因为 Rigid Robotics 强调 SecurityScorecard A–A+ 评级以及通过 tier-2 mining company 安全评估。
这些企业通常会有严格的供应商安全准入门槛,Rigid 的安全姿态有利于进入此类客户名单。
本文部分信息来源:
1.Techcouver.com:May 19, 2026 by Robert Lewis
2.https://rigidrobotics.com/
3.Perplexity/comet
本文章 by 枫叶陆移记 is licensed under CC BY-NC 4.0![]()
![]()
![]() ,欢迎非商业转载并注明:文章来自“枫叶陆移记”,链接地址为 https://runmaple.com 。
,欢迎非商业转载并注明:文章来自“枫叶陆移记”,链接地址为 https://runmaple.com 。



